- 软件介绍
- 软件信息
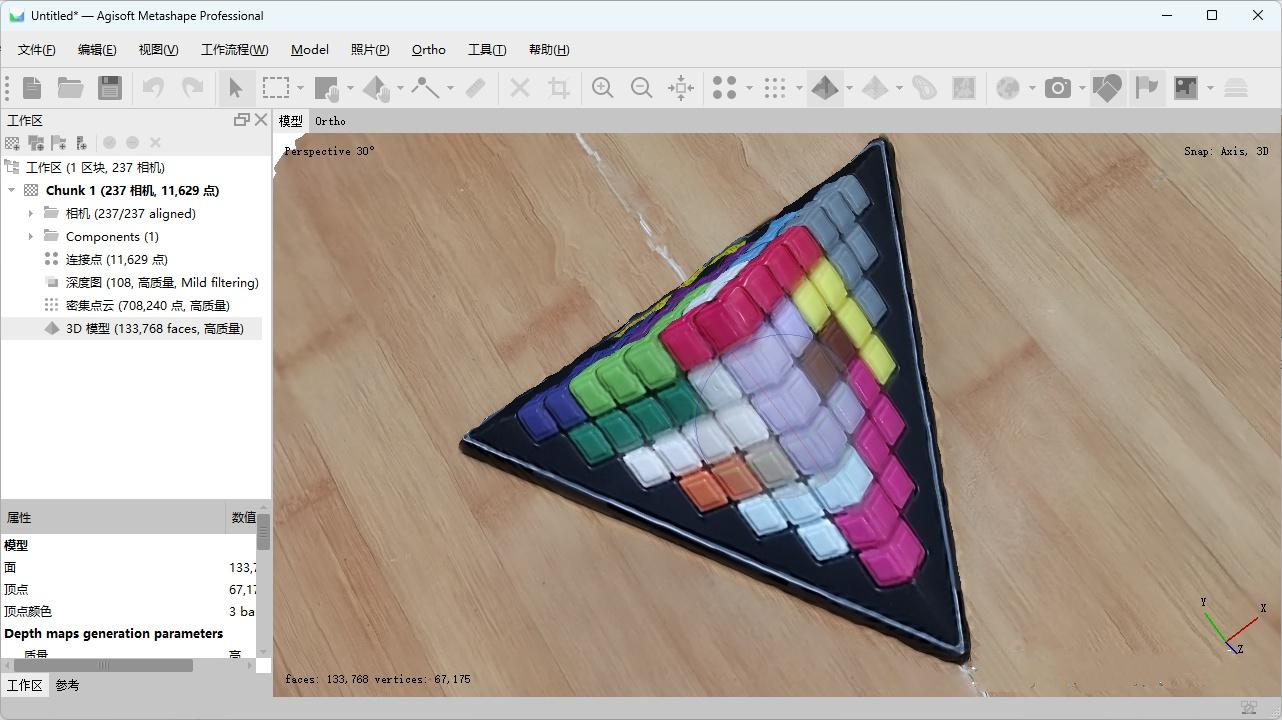
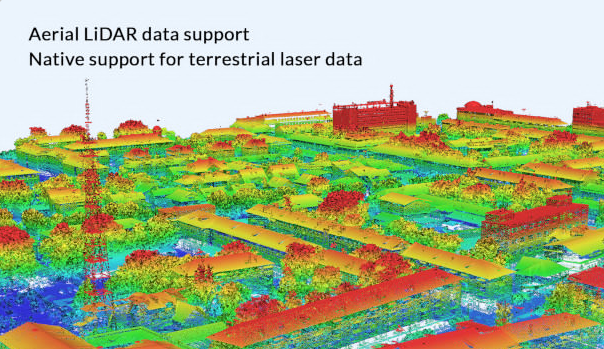
- 软件截图
- 相关下载
- 下载地址
Agisoft Metashape 3d建模软件是三维建模领域中的佼佼者,从厘米级的工业检测到千米级的城市建模,从静态文物保护到动态场景追踪的全覆盖能力,它都可以完美做到,被广大应用于各行各业,有需要的用户可以点击下载。
Agisoft Metashape 3d建模软件亮点
1、分布式计算加速:支持本地集群和云端处理,实现弹性算力调度。
2、动态场景处理:通过4D建模技术追踪动态物体,生成时序三维模型。
3、自动畸变校正:无需人工干预即可消除镜头畸变,如鱼眼镜头的桶形畸变。
4、一键式工作流:从图像导入到密集点云生成,再到三维模型输出全程自动化。
Agisoft Metashape 3d建模软件优势
1、程级地理配准:结合地面控制点,航测模型平面精度很准确,减小了偏差。
2、全类型相机支持:兼容各种类型的相机,甚至支持卫星影像,成功识别数据。
3、低内存占用设计:基于深度图的网格生成技术,降低处理点云需要的内存消耗。
4、多级语义分类:基于机器学习的点云分类功能,可自动将密集点云分为不同类别。
Agisoft Metashape 3d建模软件怎么添加地面控制点
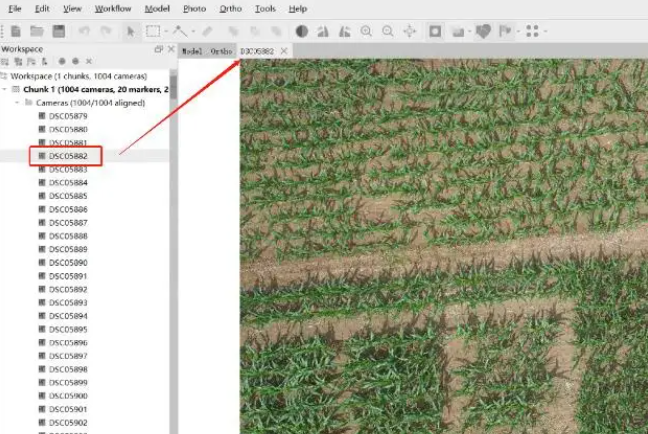
1、打开包含地面控制点的照片。
2、右键点击地面控制点,再点击Place Marker → 控制点名称。
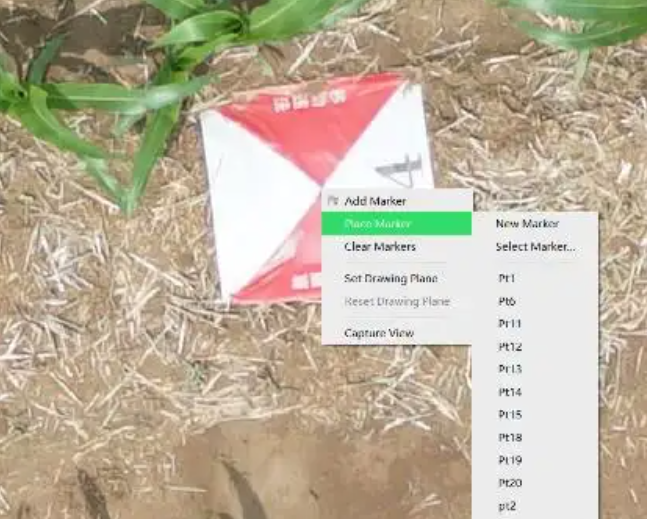
3、会出现一面绿色小旗帜和控制点名称。

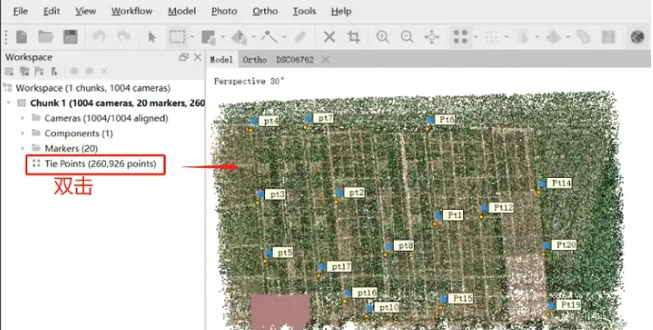
4、切换至模型视图,可查看地面控制点的位置。
软件信息
反馈问题